A Framework for Evaluating Intersection Collisions Involving Motorcycles - Part 1
Introduction
Many motorcycle crashes occur when a driver attempts to cross the path of an approaching motorcyclist at an intersection. Common patterns emerge in these crashes. This post begins exploring these collisions and builds a framework for understanding their common elements. When it comes to assessing causation in motorcycle crashes at intersections, the details matter, and the issues raised in this post will need to be considered on a case-by-case basis.
To begin, consider a scenario in which the driver of a passenger vehicle turns left across the path of an approaching motorcyclist. Initially, as depicted in Figure 1, the left-turning driver sits stopped in the turn pocket waiting to make the turn and assessing the oncoming traffic [1]. Two possible lane and lane positions are depicted for the approaching motorcyclist in Figure 1: 1) a left-of-lane position in the left lane and 2) a left-of-lane position in the right lane.
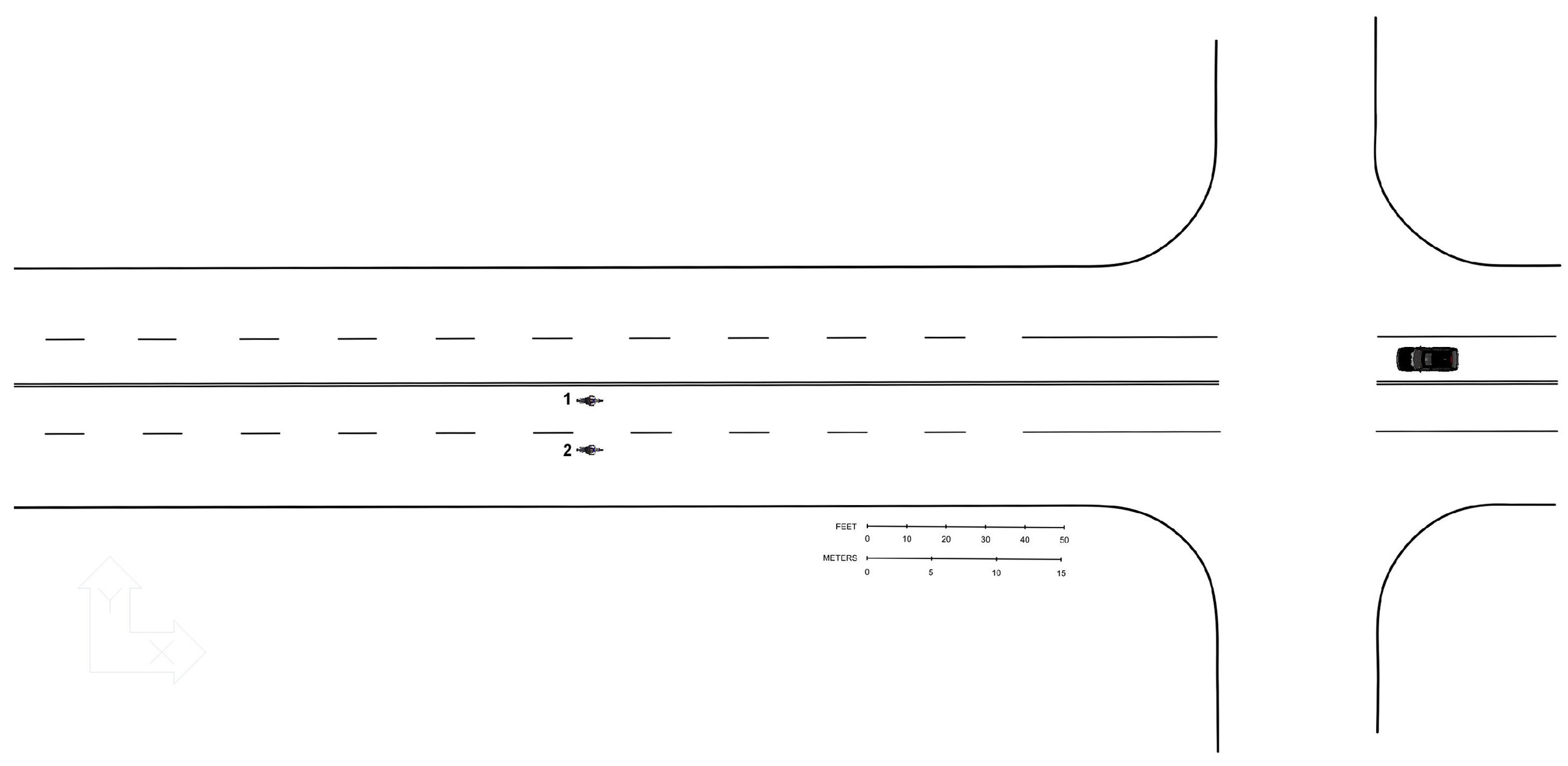
Figure 1 – A Left-Turn Across Path Scenario Involving a Motorcycle
For now, assume that this scenario is occurring during the day and there are no other vehicles approaching the intersection with the motorcyclist. The motorcyclist has a green light. The car driver also has a green light and is permitted to turn left across the motorcyclist’s path, if the turn can be completed safely. As the left-turning vehicle sits stopped and the motorcyclist approaches, there is no way for the motorcyclist to know which of these will occur:
1. The left-turning driver will wait to turn until the motorcycle has passed through the intersection.
2. The left-turning driver will turn left across the path of the motorcyclist.
3. The left-turning driver will begin a turn and then stop, blocking some portion of the intersection.
4. The left-turning driver will begin to nudge out as the motorcyclist approaches, intending to time a turn into the intersection immediately after the motorcyclist passes.
The first of these possibilities is a scenario in which the left-turning driver detects the motorcyclist and decides the available gap is insufficient to complete the turn. The second is a scenario in which the left-turning driver either does not detect the motorcyclist or misjudges the time available to make the turn. The third possibility is a scenario in which the left-turning driver does not initially detect the motorcyclist, but eventually does; or, perhaps, a scenario where the left-turning driver’s assessment of the available gap changes through the course of their maneuver. From the left-turning driver’s perspective, the fourth possibility is equivalent to the first. But from the motorcyclist’s perspective, the fourth possibility highlights the uncertainty and ambiguity inherent in this intersection approach.
For each of these possibilities, the left-turning vehicle initially represents a potential hazard for the motorcyclist. For the first possibility, the left-turning vehicle never becomes anything more than a potential hazard and calls for no emergency response. For the second and third, the vehicle proceeds into the intersection and becomes an actual, immediate hazard to which the motorcyclist must respond [2]. For the fourth possibility, the motorcyclist is left to wonder what the driver’s intentions are. If the motorcyclist could know the other driver’s thoughts, no response would be called for; but the opposing driver’s thoughts are not known. So, presented with these four possibilities, what is the dividing line between a potential and an immediate hazard, and when should the motorcyclist conclude that an emergency response is warranted [3]?
Given the uncertainty in this scenario, there are actions the motorcyclist could take to improve their ability to cope with any of the choices the left-turning driver could make. For example, they could:
Ride at a safe speed as they approach the intersection. [4]
Move as far away from the potential intruding vehicle as practical (to the right in this example).
Position two fingers on the front brake lever (or hover over both brakes). Hovering over the brakes seems to achieve about a one to two tenths of a second reduction in the motorcyclists’ perception-response time [4, 5, 6, 7, 8].
Even with these actions, ambiguity remains: the motorcyclist does not know what the left-turning driver is going to do.
A Numerical Example
To illustrate the effect of this ambiguity, consider a numerical example with the scenario of Figure 1. A Range Rover is positioned in the left turn pocket, facing to the left on the page and about to initiate a left turn across the path of an approaching motorcycle, a Triumph Street Cup, approaching from left to right on the page. The speed limit is 35 mph. For now, assume that the approaching motorcyclist is traveling 35 mph. There are two through lanes, and the motorcyclist will need to decide which lane and lane position to ride in while approaching the intersection. The two possible lane and lane-position choices depicted in Figure 1 are not the only options for the motorcyclist, but these will be adequate for illustration purposes.
Assume, for now, that the left-turning Range Rover is a time-limited hazard [9]. This means that the driver of the Range Rover will make a continuous turn and be in the motorcyclist’s path for a limited time. Formulated this way, the avoidance action required by the motorcyclist is to lengthen the time it takes to reach the intersection, so the Range Rover will be afforded the necessary time to pass through. This scenario can deteriorate for the motorcyclist if the driver of the Range Rover recognizes the presence of the motorcyclist partway through the turn and makes the choice to stop in the intersection, perhaps ending up within the path of the motorcyclist. The scenario then becomes a distance-limited hazard where the motorcyclist must stop short of the stopped or stopping vehicle [10].
We make the following additional assumptions in developing this scenario:
The driver of the Range Rover rolls straight forward for 1.5 seconds with an acceleration of 0.07 g, and then initiates the turn.
As the driver initiates the turn, the acceleration increases to 0.15 g.
The driver of the Range Rover releases the throttle when the vehicle’s lateral acceleration reaches approximately 0.22 g [11].
The perception-response time (PRT) for the approaching motorcyclist begins when the heading angle of the Range Rover begins changing (i.e., the first lateral movement of the Range Rover; this occurs 2.0 seconds into the scenario).
A 1.5 second PRT is assumed for the motorcyclist [12]. This PRT includes the time it takes for the motorcycle to respond to the operator’s avoidance input (braking in this illustration). Thus, the motorcyclist will achieve the maximal braking level at 3.5 seconds into the scenario.
A 0.25 second brake lag is assumed for the motorcycle. This lag time is included in the PRT [13], so the braking starts building up 3.25 seconds into the scenario.
Two braking levels are considered – 0.35 and 0.6 g. The first of these is equivalent to moderate braking with the front and rear brakes or emergency level braking with the rear brake only. Most riders will be able to achieve this deceleration level. The second braking level is equivalent to an emergency level of braking with the front and rear brakes (or the front only). Many riders will be able to achieve this level of deceleration (at least in a parking lot or on a riding range when they are not confronted with an actual immediate hazard), but not all. Some riders will be able to exceed this level of deceleration. Some riders will exceed a 0.6 g deceleration, but will lock up their front tire doing so, and will lay the motorcycle down or cause it to pitch over. This assumes the motorcycle does not have antilock brakes (ABS). For motorcycles with ABS, motorcyclists may be able to achieve a higher deceleration on a more consistent and predictable basis without capsizing.
These assumptions were implemented, and the scenario developed, in the simulation software package PC-Crash [14]. This analysis resulted in the following zones for the two possible lane and lane positions (see Figure 2):
Red Zone – An impact is unavoidable by the motorcyclist. The left extent of this zone is defined by the motorcyclist achieving a braking deceleration of 0.60 g.
Yellow Zone – An impact is avoidable by the motorcyclist assuming they can achieve a deceleration between 0.35 and 0.60 g.
Gray Zone – An impact is avoidable by the motorcyclist assuming they can achieve a deceleration between 0.00 and 0.35 g.
Brown Zone – In this zone, the motorcyclist would not need to brake to avoid a collision. However, since the motorcyclist cannot read the mind of the left turning driver and cannot predict the exact timing of the left-turn, they might choose to brake. This braking could lead to a collision that would not have otherwise occurred. The precise size of the brown zones will vary from rider-to-rider due to variations in the psychology and perceptions of riders.

Figure 2 – Avoidance zones for this scenario (red = unavoidable; yellow = avoidable with a braking deceleration between 0.35 and 0.60 g; gray = avoidable with a braking deceleration between 0.00 and 0.35 g; brown = braking not necessary but might be employed)
The zones in Figure 2 were established using motorcycle positions corresponding to the beginning of the Range Rover’s turn, as signified by the heading of the Range Rover beginning to change (2 seconds into the simulations). Several observations follow from these zones [15]. First, the size of red zone is significantly larger for the rider who chooses the left lane over the rider who chooses the right lane. The combined size of the yellow and gray zones (the area where braking by the motorcyclist makes a difference) is also smaller for the rider in the left lane compared to the rider in the right lane. The rider who chooses the right lane benefits from increasing the lateral distance between themselves and the left turning vehicle. This would be reversed for a scenario where the Range Rover is attempting to cross the intersection from the motorcyclist’s right.
The zones in Figure 2 are established assuming the motorcyclist begins perceiving and responding as soon as the heading angle of the Range Rover begins to change. With a PRT of 1.5 seconds, this implies the motorcyclist begins applying the brakes when the Range Rover is in the position shown in Figure 3. Thus, particularly for the motorcyclist in the right lane, this scenario remains ambiguous when their braking response must begin. Will the driver make a continuous turn or suddenly recognize the presence of the motorcyclist and make the choice to stop in the intersection? There is no way for the motorcyclist to know before they must respond. They could wait to respond until the situation becomes less ambiguous, but this delay would increase the likelihood of a collision for the scenarios in which the Range Rover proceeds through the path of the motorcyclist. For an accident reconstructionist, this means that the response of the motorcyclist should be judged based on what could be known about the scenario by the motorcyclists at the time the response was required, not based on the hindsight of the accident reconstructionist who knows what the left-turning driver ultimately chose to do.

Figure 3 – The position of the Range Rover when the motorcyclists begin braking
Endnotes
This is the same intersection geometry used by Ouellet in his study titled “Lane Positioning for Collision Avoidance: An Hypothesis.” See the Proceedings of the 1990 International Motorcycle Safety Conference: The Human Element, vol. 2, Orlando, Florida, pp. 9.58–9.80.
Muttart, J.W., Drivers’ Responses in Emergency Situations, Crash Safety Solutions, February 2019.
Muttart compiled studies that examined driver perception-response times (PRT) for this scenario. This compilation is contained within his software I.DRR (Interactive Driver Response Research). For this scenario, Muttart recommends referencing the start of the approaching driver’s or motorcyclist’s PRT to the first lateral movement of the left-turning vehicle. This reference for the PRT enables a consistent comparison of a crash scenario to the data contained in the studies. However, it is important to state that we do not know the precise timing of the approaching rider’s perceptions or thoughts. Fortunately, we do not need to know this timing for our analysis. I raise this issue simply to point out that, despite the method we use for analysis, for the motorcyclist in the real-world scenario, the dividing line between a potential and immediate hazard in this scenario is ambiguous. This is particularly a problem for approaching motorcyclists because there is the possibility of the motorcycle capsizing from the heavy braking if the motorcyclist responds more severely than needed. The problem for the motorcyclist is to discern how severe of a response is needed without having access to the left-turning driver’s thoughts or intentions.
And you ask, what is a safe speed? The answer is, of course, that it depends. We could perhaps start with equating a safe speed with the speed limit. However, keep in mind that, for motorcyclists, there are sometimes legitimate reasons for not riding the speed limit while approaching an intersection. For example, a motorcyclist can gain a safety advantage by traveling through an intersection with other traffic – using that traffic as a shield. Sometimes the other traffic will be exceeding the speed limit and it will be safer for the motorcyclist to speed to keep up with that traffic than to fall back and travel through the intersection alone.
Hurt, H., Thom, D., Hancock, P., “The Effect of Hand Position on Motorcycle Brake Response Time,” 28th Proceedings of the Human Factors Society, 1984.
Prem, H., “The Emergency Straight-Path Braking Behaviour of Skilled versus Less-skilled Motorcycle Riders,” SAE Technical Paper 871228, 1987, doi:10.4271/871228.
Ecker, H., Wassermann, J., et al., “Brake Reaction Times of Motorcycle Riders,” International Motorcycle Safety Conference, March 1-4, 2001, Orlando, FL.
Muttart, J.W., Drivers’ Responses in Emergency Situations, Crash Safety Solutions, February 2019.
Searle, J., “What if the Speed Had Been Less? Causation in Time Limited and Distance Limited Hazards,” SAE Technical Paper 2020-01-0881, doi:10.4271/2020-01-0881.
And, of course, from the motorcyclist’s perspective, these scenarios may not be distinguishable at the time the motorcyclist needs to begin responding. The motorcyclist may respond as if the scenario were a distance limited hazard regardless of what the left-turning driver ends up doing.
This is within the range of lateral accelerations reported in the following reference: Carter, N., Beier, S., Cordero, R., “Lateral and Tangential Accelerations of Left Turning Vehicles from Naturalistic Observations,” SAE Technical Paper 2019-01-0421, 2019, doi:10.4271/2019-01-0421.
One factor worth mentioning here: Muttart and others have shown that the angle between the approaching driver’s eyes and the left-turning vehicle (the eccentricity) influences the PRT, with the PRT getting longer as the eccentricity angle increases. The time-to-collision, which would be different for the left and right lane scenarios, can also have an influence on the PRT. For this illustration, we are assuming that motorcyclists riding in the left and right lanes would have the same PRT, but in actuality, the rider in the right lane would have a higher eccentricity to the left-turning vehicle, and thus potentially a longer PRT. We will take up a more nuanced illustration in the next post. The PRT used here in this section is for illustration purposes.
Muttart, J.W., “Estimating Driver Response Times,” Chapter 14 of Handbook of Human Factors in Litigation, CRC Press, 2005.
Rose, N.A., N. Carter, “An Analytical Review and Extension of Two Decades of Research Related to PC-Crash Simulation Software,” Society of Automotive Engineers (SAE) Technical Paper Number 2018-01-0523, April 2018.
Ouellet, “Lane Positioning for Collision Avoidance: An Hypothesis,” Proceedings of the 1990 International Motorcycle Safety Conference: The Human Element, vol. 2, Orlando, Florida, pp. 9.58–9.80.