Case Study: Using GoPro Telemetry Data when Reconstructing a Motorcycle Crash
Nathan Rose, Jacob Palmer, and Michael Erickson of Explico reconstructed a nighttime, left turn across path (LTAP-OD) motorcycle crash involving a newer model Chevrolet Malibu and a Suzuki GSX-R750 motorcycle. The Chevrolet turned left across the path of the Suzuki. The speed limit for the motorcyclist approaching the intersection was 40 mph. The left-turning driver stated that she did not see the approaching motorcycle prior to initiating her turn.
Investigating officers spoke with a witness who heard a motorcycle revving its engine, then heard a boom. The officers also located a GoPro camera at the scene, which had initially been attached to the motorcyclist’s helmet. Investigating officers were able to obtain video from the GoPro camera, including video footage of the crash. The officers used motorcycle positions depicted in the video to calculate average speeds for the Suzuki. One of the officers stated: “According to the playback of the GoPro video, the frame rate for the video is 30 frames per second. With this frame rate from the video, a speed can be calculated. I utilized the #1 westbound dash lane lines as points to obtain the distance covered by V2 prior to the collision. I obtained a distance which was approximately 317 ft…” The officer calculated an average speed of 52.5 mph for this 317 foot distance. However, this average speed has little utility in understanding how this crash occurred because it does not tell us anything about the instantaneous speeds traveled by the motorcyclist.
We conducted additional analysis of the footage from the GoPro camera. Based on the metadata from the video, we determined that the footage was captured on a GoPro Hero7 Silver and that the footage had a frame rate of approximately 30 frames per second. Some GoPro camera models, including the Hero7 Silver that the motorcyclist was utilizing, capture telemetry data along with the video. Specifically, these cameras contain GPS receivers, triaxial accelerometers, and triaxial gyroscopes, and they collect data including location, path, speed, acceleration, heading, and altitude. The telemetry data collected by the GoPro camera is embedded in the metadata of the video. We used a telemetry extractor to extract the raw telemetry data from the GoPro video file.
A peer-reviewed study by Karla Petroskey and Charlie Funk of Explico evaluated the accuracy of data obtained from several GoPro camera models through a series of controlled tests, which included acceleration, turning, steady state, and braking events.[1] Petroskey et al. reported that the GPS speed data recorded by the GoPro cameras in their testing had an average root mean square error (RMSE) of approximately 0.5 mph when compared to other GPS-based instrumentation that is widely used and accepted as accurate and reliable by accident reconstructionists (a Racelogic VBOX 3i 100Hz data logger). They also reported that the GoPro speed could have a time lag of as much as 0.4 seconds. Petroskey, et al. concluded: “The sampling rate and accuracy of telematics data recorded by GoPro cameras is as good as or better than other consumer grade data acquisition options, including portable navigation devices and smart phone applications. The GoPro cameras are able to accurately represent dynamic events such as aggressive acceleration, aggressive braking, and high-speed cornering.”
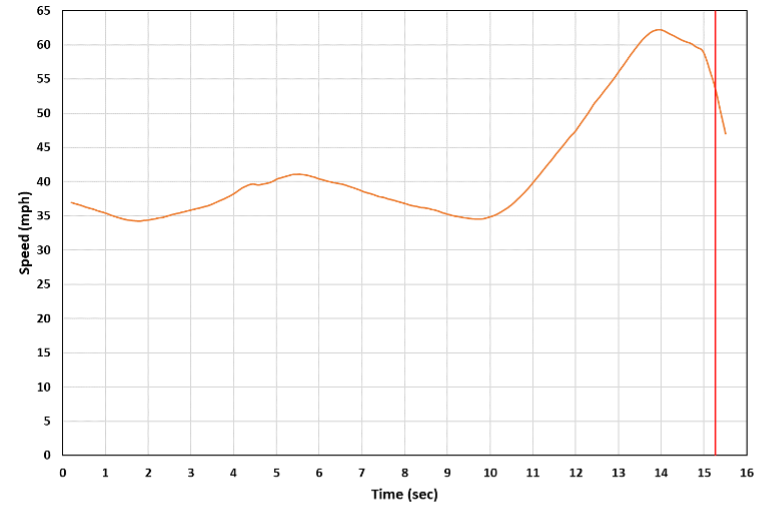
The graph below shows the speed data that we obtained from the subject GoPro camera for the 15½ seconds preceding the collision. In this graph, time is plotted on the horizontal axis and speed is plotted on the vertical axis. The time of the collision is identified with the red vertical line on the graph (approximately 15.27 seconds). The orange line on the graph is the motorcyclist’s speeds leading up to the collision. This speed data shows the motorcyclist initially traveling around the speed limit of 40 mph as he approached the intersection with with his speed fluctuating between 34 and 41 mph. About 5 seconds prior to the collision, he began accelerating and reached a speed of approximately 62 mph before releasing the throttle and applying his brakes in response to the Chevrolet intruding into his path.
Next, we used this speed data from the GoPro footage to calculate the motorcyclist’s distance from impact during this timeframe leading up to the collision. The results of these calculations are shown in the next graph. As this graph shows, the motorcyclist was approximately 400 feet from impact when he began accelerating from a speed of just under 35 mph. He accelerated past 40 mph when he was approximately 337 feet from impact (approximately 4.25 seconds from impact). He continued to accelerate and reached a speed of approximately 62 mph when he was approximately 120 feet from impact (approximately 1.35 seconds from impact). The motorcyclist braked and decelerated to a speed of approximately 53 mph at impact. Had he stopped accelerating when he reached 40 mph and continued at that speed in the 337 feet leading up to the collision, it would have taken him 5.74 seconds to traverse this distance rather than 4.25 seconds. In this scenario, he would have arrived in the area of the collision approximately 1.5 seconds later than he did during the subject accident.

The airbag control module (ACM) of the Chevrolet Malibu was equipped with an event data recorder (EDR). Investigating officers used the Bosch Crash Data Retrieval (CDR) system to access and image the ACM. The ACM contained a locked deployment event. The CDR data reported a maximum longitudinal change in velocity from the collision of -6.2 mph. The minus sign on this value indicates a rearward directed force. The ACM reported a maximum lateral change in velocity from the collision of -2.5 mph. The minus sign on this value indicates a right-to-left force on the vehicle. Based on these reported maximum longitudinal and lateral velocity changes, the maximum resultant change in velocity was approximately 6.7 mph.
The CDR data included speed, brake, and throttle data for the Malibu for approximately 5 seconds preceding the subject collision, reported at ½ second intervals. This data showed that the Malibu was traveling 19.3 mph approximately 5 seconds prior to the collision. Initially, the driver was applying the brakes of the Malibu and slowing. She slowed the vehicle to approximately 9.9 mph approximately 3 seconds prior to the collision. She then released the brake and began applying the throttle. The vehicle began accelerating and reached a speed of approximately 13.7 mph when it was approximately ½ second from impact. If the motorcyclist had arrived at the area of the collision 1.5 seconds later, the Malibu could have traveled at least 30 additional feet. Since the length of the Malibu was approximately 16 feet, an additional 30 feet would have been sufficient for the Malibu to clear the motorcyclist’s path, and the collision would not have occurred.
The investigating officers in this case recovered the GoPro video footage of the crash, but they did not recognize the presence of the telemetry data contained within that footage. This case study illustrates how this data can provide valuable data for the reconstruction and for evaluating how the crash could have been avoided.